Pneumatic Soft Gripper
Project Overview
Design and development of soft robotic gripper for the purpose of manipulating plastic straws. Actuator parameters optimized and selected through parameter sweeping. Resin molds fabricated and gripper prototyped with performance evaluated.
Project Objective
This project focused on the design, modeling, and fabrication of a soft, fiber-reinforced pneumatic actuator gripper capable of lifting a plastic straw from a flat surface without damaging them. The developed solution is intended to test functionality prior to integration into a manufacturing assembly line. A fiber reinforced soft actuator was the prescribed solution. This design uses a soft body with a thin inextensible layer along the base. The whole design is wrapped in a fiber to prevent ballooning.
Specifications
- Grip straw with a 7mm diameter
- Retain grip throughout handling
- Grip force does not collapse straw
- Design utilizes soft fiber reinforced actuator structure
- Pressure delivered via medical syringe
Technical Process
1. Define Design Constraints
Define operational constraints that describe a functioning actuator. These included the actuation force, the actuators ability to grip the straw, and a lack of contact with the ground during operation.
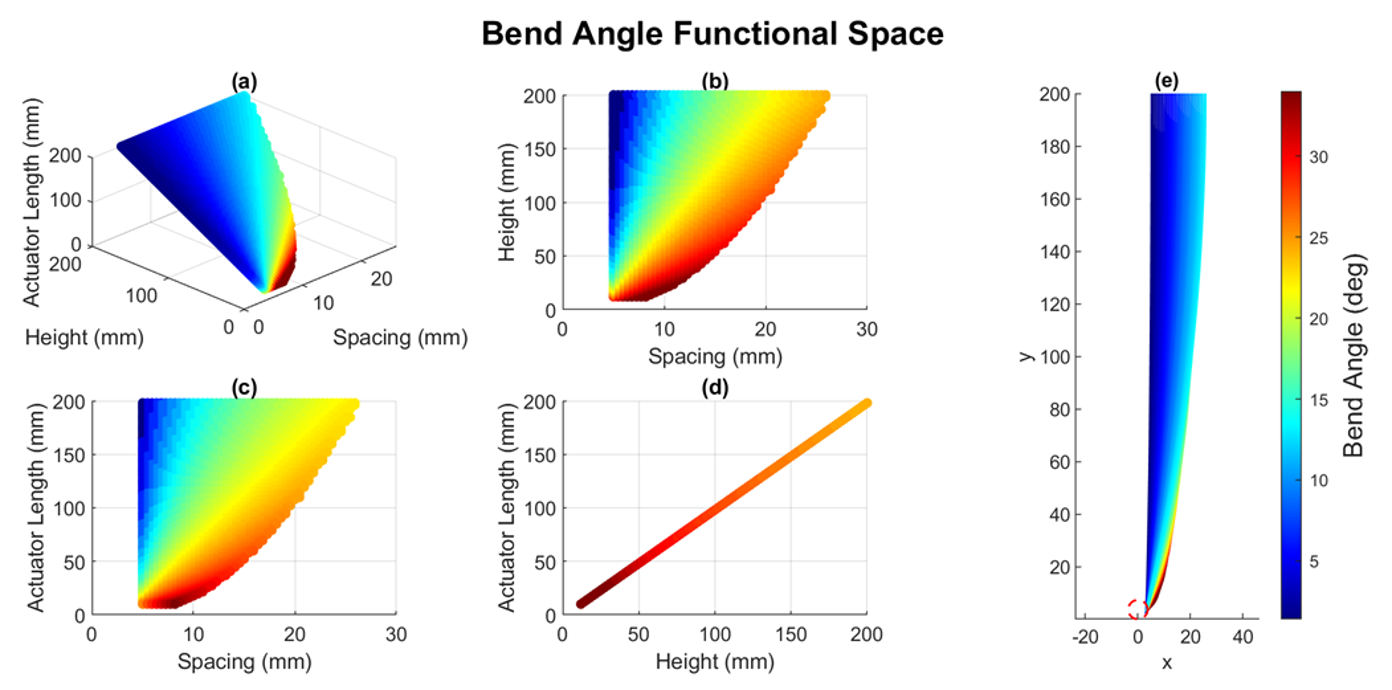
2. Establish Actuator Length Parameter Sweep
To define the length of a functional actuator, a zero thickness constant curvature trajectory model was created in MATLAB. Trajectories were swept in parallel across actuator length and xy position, with successful contact with the bottom half of the target being logged. Additionally, successful configurations had maximum width calculated by finding the minimum value for the normal distance from the end effector to the x axis.
3. Cross-Sectional Parameter Sweep
The cross sectional dimensions of air chamber radius, base thickness and top thickness required definition next. A potential configuration space was generated by performing a 3 dimensional sweep with a defined target force and bend angle using a Quasi-Static Fiber Soft Actuator Model developed by Polygerinos et al.
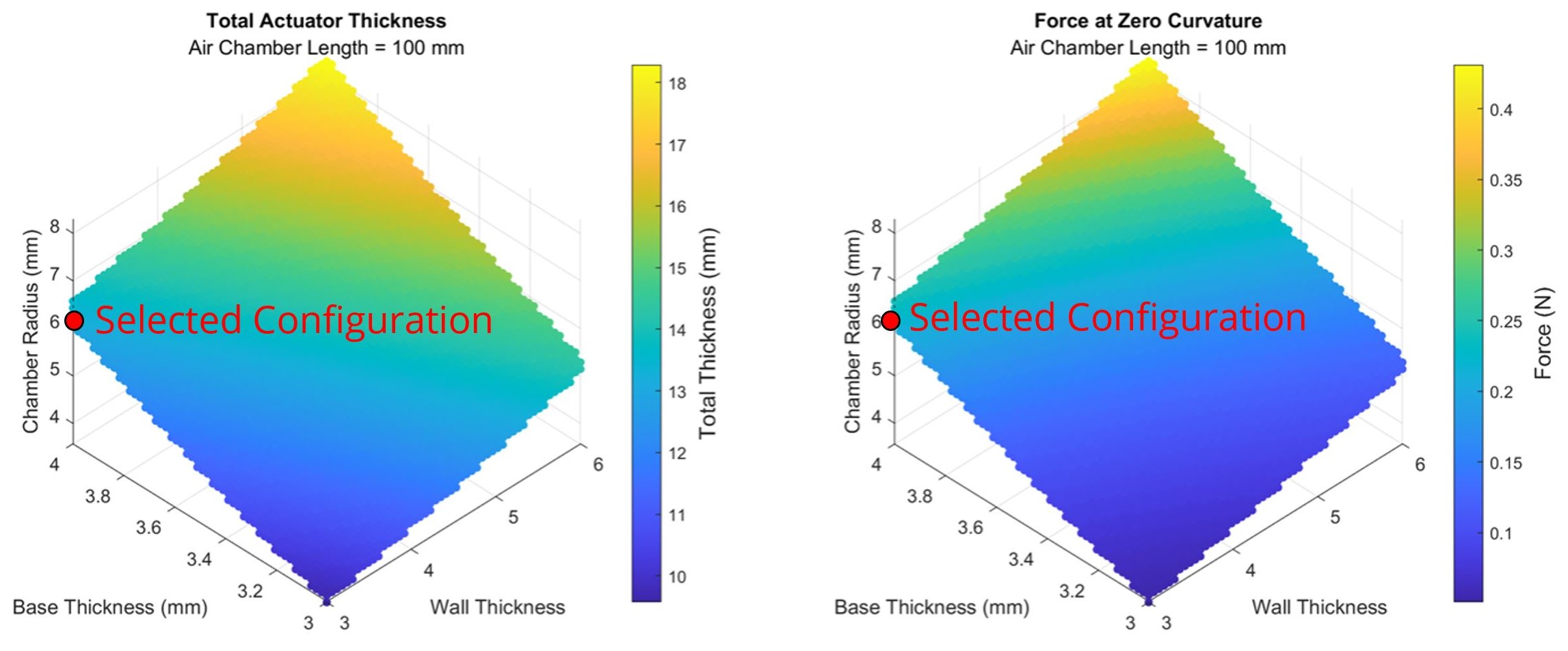
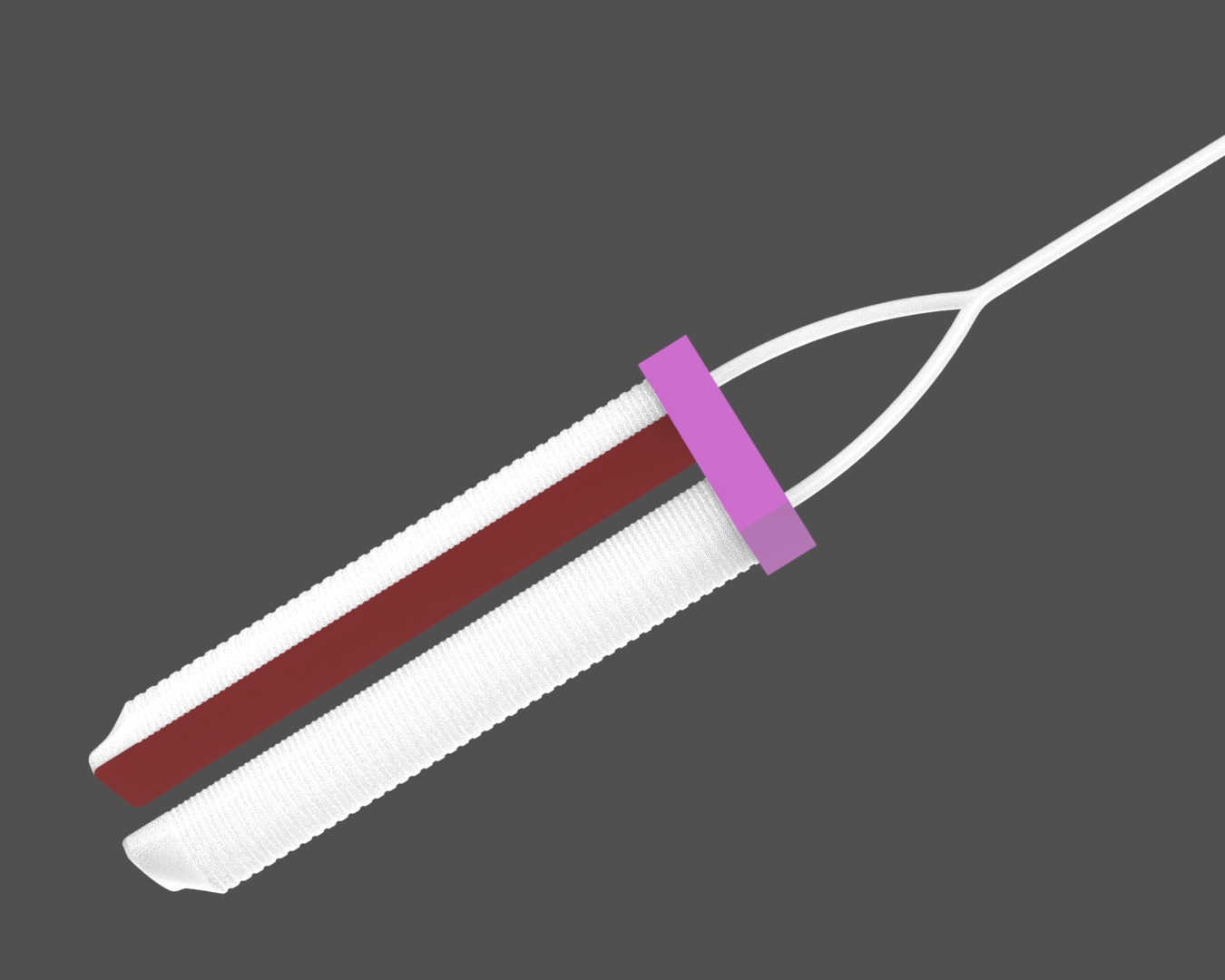
4. Actuator Design
Actuator dimensions that minimized thickness while maximizing output forces were selected from the configuration spaces. From these dimensions an initial model of the soft actuator body was constructed in SolidWorks. The design used Ecoflex 0030 for the body, polyethylene sheet for the inextensible layer and 0.3 mm nylon line for the fiber sheath. A tapered tip was added to mitigate ground contact
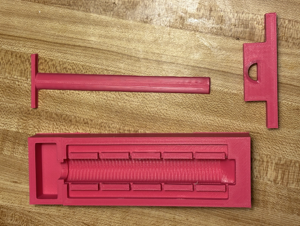
5. Mold Design and Fabrication
Initially a closed, vertical mold with a floating mandrel was designed and FDM 3D printed, however resin leaked through the parting lines so the design was abandoned. The revised mold was an open top horizontal design that kept the floating mandrel. This would be the design used to produce the final prototype.
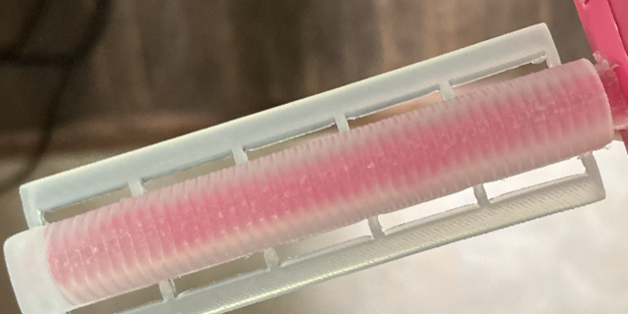
6. Actuator Fabrication
Two part Ecoflex 0030 was mixed and poured into the open top mold with the mandrel in place. After sitting for 12 hours, the actuator was removed from the mold. With the mandrel still inserted, the inextensible layer was placed on the base and the assembly was wrapped in fiber. Two actuators were affixed to a 3D printed mount and pneumatic tubing was plumbed.
7. Testing
To evaluate the effectiveness of the prototype soft gripper, grip acquisition and retention tests were performed. The design was found to be capable of lifting aligned and unaligned straws from a flat surface.
Outcome and Impact
- Designed and prototyped fiber reinforced soft actuator that successfully completed intended function.
- Gained valuable experience in using parallel processing to perform parameter sweeps within MATLAB.
Image Gallery